

This catapult was a project that I started in my Engineering Tech class, senior year. The initial planning for the construction was assisted by my friend Joe, but it quickly escaped to become my own project. The few weeks of class time ended up not being enough time to finish the construction. The catapult was finished on a weekend. During second semester and summer (2006), I used the LDraw set of tools, specifically MLCad and L3PAO, POV Ray, the GIMP, and Windows Movie Maker to create an accurate CAD drawing, fancy renders, and even an animation of the catapult. Needless to say, I wowed a lot of people over the summer with what I did and learned.
The robot uses two microcomputers, the Lego RCX and Lego Scout, for controlling and powering the motors. The RCX has three motor outputs and three sensor inputs. The Scout has two of each. The motor and sensors were wired as listed:
- RCX Motor 1: powers both grabber and clutch
- RCX Motor 2: powers grabber lift winch
- RCX Motor 3: powers catapult arm winch
- Scout Motor 1: powers drive motor
- Scout Sensor 1: touch sensor triggered by grabber arm movement
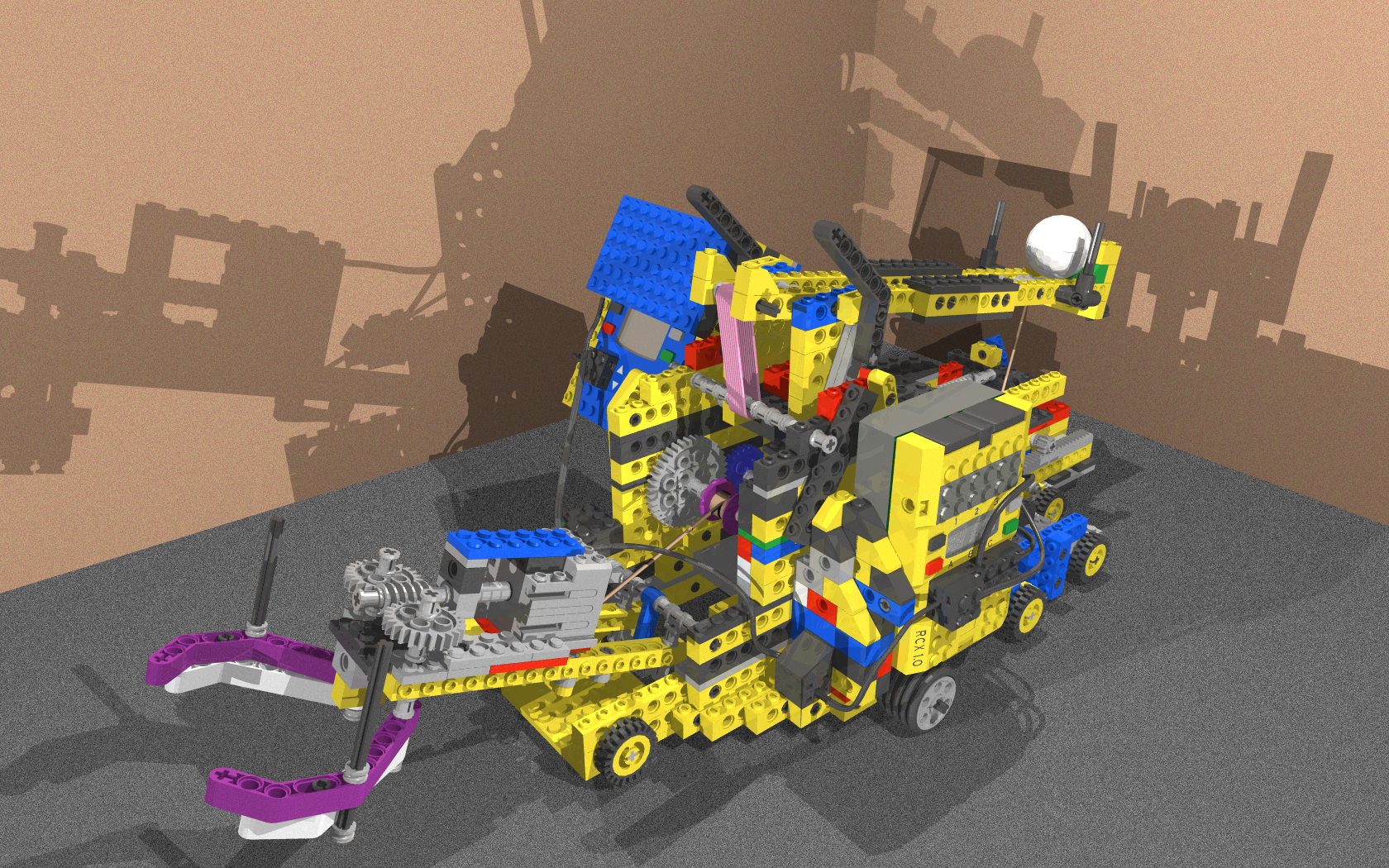
Here's the final render of the catapult. I'd say that it's at least 95% accurate, I even modeled the wiring (that was a tedious step). I left the computer running at least two hours to complete the render.
The animation of the
catpult is here.
-7-19-07